日立が自律移動の双腕ロボット、集品作業を代行
日立製作所は、多品種の商品を取り扱う倉庫において、集品作業を行う自律移動型双腕ロボットの試作機を開発、グループ会社の日立物流のアディダス営業所で公開した。2~3年後にはグループ会社の工場で実用化し、5年後の市販化を目指す。


昨今のネット通販市場の拡大や顧客ニーズの多様化に伴い、多品種少量型倉庫の増加が背景にある。広大な倉庫内に商品が並んでいる棚の中から特定の商品を探し出し、それを運んできて箱に詰めるといった、これまで人が行ってきた集品作業を同ロボットが担う。
今回発表のロボットは、回転台付きの自走式台車である無人搬送車(AGV)の上にパンタグラフ式の昇降台を2台搭載し、それぞれの上にセイコーエプソン製の6軸の産業用ロボットアームを1本ずつ取り付けた構造となっている。昇降台は2本のロボットアームを独立に上下させることが可能。アームの先にはそれぞれ違うエンドエフェクターが付いている。右手にはカナダROBOTIQの2指グリッパーと日本ピスコ製の吸着グリッパーがそれぞれ1つずつ、左手にはドイツSCHMALZの吸着グリッパーを取り付けた。
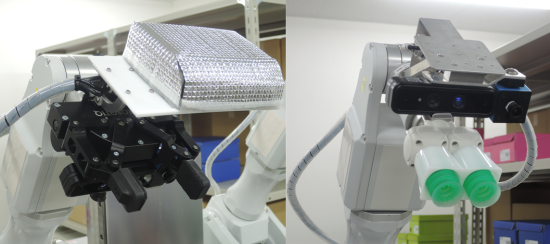
両手とも、商品認識用のカメラと距離画像センサーを1つずつ備えている。例えば、左手でペットボトルの入った箱を吸引することで棚から引き出し、すかさず右手の2指のグリッパーでペットボトルの蓋の部分をつかんで取り出し、別の箱に詰めるといった一連の動作が可能だ。また、本来1本のアームでは支えられない靴の箱の側面を、左手の吸引で引き出した際に右手で支えるといった、両手の協調作業なども自然にできる。最大で質量1kg、長辺30cmのものまでは扱える。
現在実用化されている自動集品システムには、商品の仕分け機構や移動機構を持った単機能のロボットはあるものの、それらが統合され連携動作するものはなかった。一般に、走行台車と昇降台とアームが連携する場合、機構間でやりとりする通信量と演算が膨大になり、動作遅れの原因となる。これに対して今回のロボットでは、機構間での通信を最低限に抑え、あらかじめロボット側に動作する際の適切なタイミングなどが定義してある。
このため、走行停止状態から箱を取り出すまでに掛かる時間を、同社比で7秒から3秒に短縮できたという。人が棚を探す作業時間を加味すると、人と同程度のスピードを実現している。
日立は1960年代からアーク溶接など産業用ロボットの開発に取り組んできており、2000年代には人型ロボットの「EMIEW」を開発するなど、ロボット開発の歴史は長い。物流搬送システムとしては、2009年にSLAM技術を用いた物流搬送システム「インテリジェントキャリー」を製品化。2014年には棚を持ち上げ運搬する「Racrew」を発売し、現在、日立物流の倉庫で20台が稼働している。
同社は2015年8月、棚の配置が変化する環境で、床にマーカーがなくても移動できる技術を発表している。この技術は、AGVに事前に登録する配置図を、倉庫の壁や柱などの「動かない領域」と、商品棚などの「動く領域」に分けて管理する。この配置図と距離センサーで計測した柱や商品棚の位置情報を照合し、自車の位置を認識した後、「動く領域」にある商品棚の配置情報のみを更新することで、環境変化をリアルタイムに把握できる。今回発表のロボットにもこの技術が採用されている。
今後は実用化に向けて、小型・軽量化や人が入ってきた場合の安全対策などを施すとしている。「形状が変わる衣類のようなものをピッキングすることや、多品種の商品を効率良く箱詰めしていくことにも対応していきたい」(日立製作所 研究開発グループ 基礎研究センタ 木村宣隆研究員)としている。
(日経Robotics 長場景子)
[日経テクノロジーオンライン 2015年8月26日掲載]








